| 超全汇总 | 您所在的位置:网站首页 › orb slam2流程 › 超全汇总 |
超全汇总
|
双目VIO版本,加入了LK光流和滑动窗口BA优化 [VI-ORB](https://github.com/jingpang/LearnVIORB), 京胖实现的VI-ORB-SLAM2 [Fisheye-ORB-SLAM] (https://github.com/lsyads/fisheye-ORB-SLAM),添加了支持鱼眼 [Save and load orb-slam2 maps] (https://github.com/AlejandroSilvestri/osmap),添加保存和导入地图功能 [ORB_SLAM2 with map load/save function] (https://github.com/Jiankai-Sun/ORB_SLAM2_Enhanced),添加保存和导入地图功能 [Viewer for maps from ORB-SLAM2 Osmap] (https://github.com/AlejandroSilvestri/Osmap-viewer), 添加了地图可视化 [Add line feature based ORB-SLAM2] (https://github.com/atlas-jj/ORB_Line_SLAM),添加了线特征
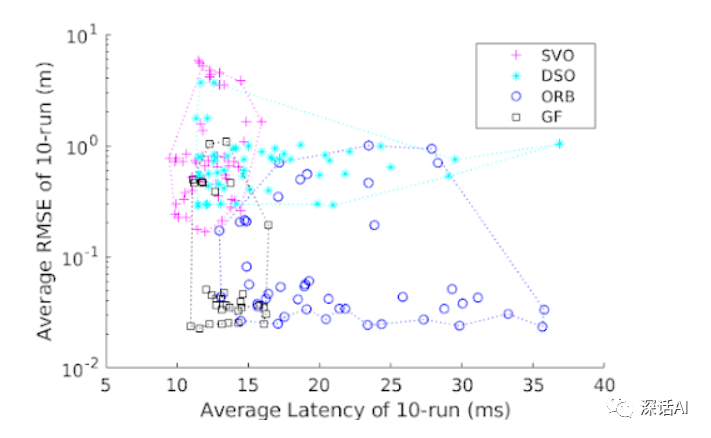
[RGBD-SLAM with Point and Line Features, developed based on ORB_SLAM2] (https://github.com/maxee1900/RGBD-PL-SLAM),添加了点线融合 [Good Feature Selection for Least Squares Pose Optimization in VO/VSLAM] (https://github.com/ivalab/gf_orb_slam2),使用了一种更好的特征选择方法
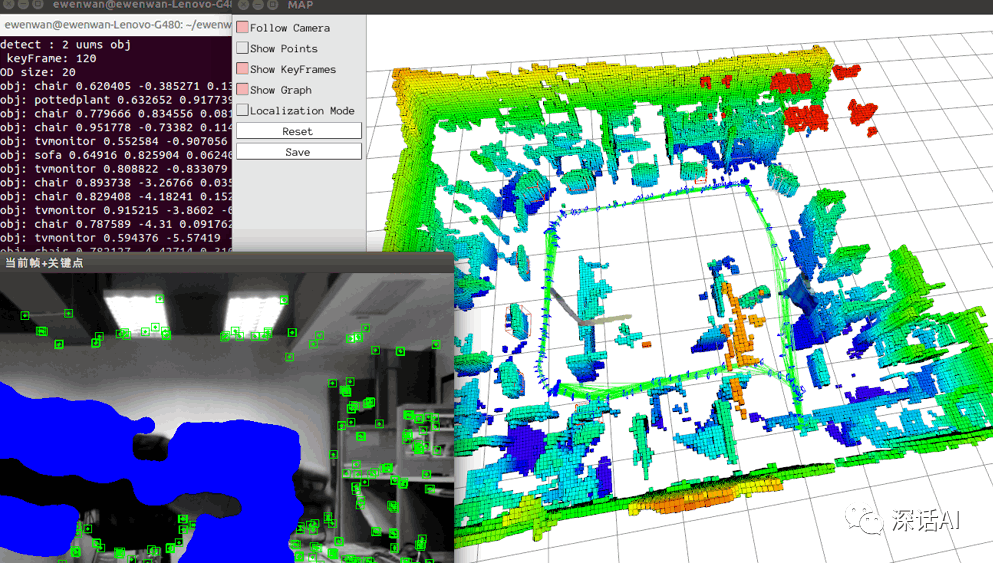
[ORB_SLAM2_SSD_Semantic](https://github.com/Ewenwan/ORB_SLAM2_SSD_Semantic), 动态语义SLAM 目标检测+VSLAM+光流/多视角几何动态物体检测+octomap地图+目标数据库
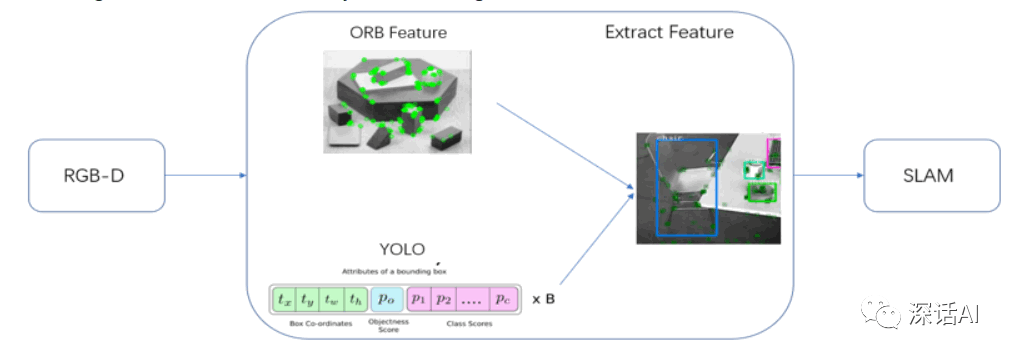
[Tracking Enhanced ORB-SLAM2] (https://github.com/Eralien/TE-ORB_SLAM2), 用YOLO v3的语义信息来增加跟踪性能
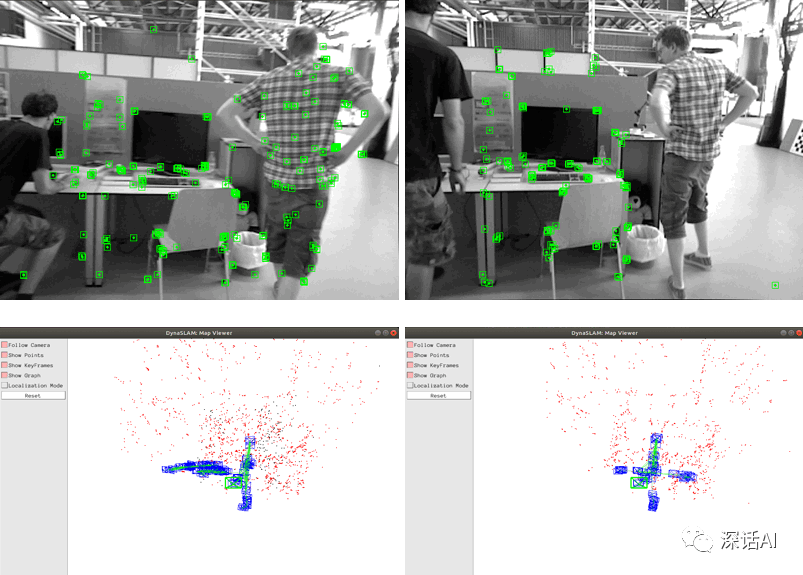
[YOLO Dynamic ORB_SLAM](https://github.com/bijustin/YOLO-DynaSLAM),用YOLO来做动态环境的检测
多平台移植代码 [Windows version ORBSLAM2,Easy built by visual studio] (https://github.com/phdsky/ORBSLAM24Windows), Windows平台版本,可以用 visual studio轻松编译 [ORB-SLAM-Android, test on Sony Xperia Z] (https://github.com/castoryan/ORB-SLAM-Android), Android移植,在 Sony Xperia上测试 [ORBSLAM2 on Mac OSX] (https://github.com/meiroo/ORBSLAM2-OSX),Mac OSX版本 [ROS interface for ORBSLAM2] (https://github.com/ethz-asl/orb_slam_2_ros),添加ROS接口 ORB-SLAM3 相关代码 ORB-SLAM3 2020年07月开源, 论文《ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM》 ORB-SLAM3特点 支持视觉、视觉加惯导、混合地图的SLAM系统,可以在单目,双目和RGB-D相机上利用针孔或者鱼眼模型运行。 基于特征的紧耦合的VIO系统,仅依赖于最大后验估计(包括IMU初始化时)。因此不管是在大场景还是小场景,室内还是室外都能鲁棒实时的运行,精度上相比于上一版提升了2到5倍 根据新的重定位模块来构建的多地图系统,可以让系统在特征不是很好的场景中长期运行。 第一个能够在所有算法阶段重用所有先前信息的系统,可以在BA的时候使用相隔很远的共视关键帧。[PAPER](https://arxiv.org/pdf/2007.11898.pdf) [CODE](https://github.com/UZ-SLAMLab/ORB_SLAM3)
ORB_SLAM3-RGBD-Inertial 增加了RGBD-IMU的运行模式和ROS接口,增加了单目IMU和双目IMU的ROS接口,替换了词典为二进制格式,加载速度更快。依据ORB_SLAM3重写了RGBD-IMU的ROS接口,避免出现队列拥塞,提供了Kinect for Azure的参数文件 [CODE](https://github.com/xiefei2929/ORB_SLAM3-RGBD-Inertial) pdf版本,在扫描下方二维码,关注 深话AI,后台回复: ORBSLAM 回复:OpenCV,下载OpenCV资料及练习代码 回复:MVG,下载计算机视觉中的多视图几何,英文原版及中译本 回复:ML,下载机器学习书籍及实战资料 回复:PCL,下载点云库PCL学习教程 最新资源下载: 最新《医学图像深度语义分割》综述论文(附下载) 返回搜狐,查看更多 |
【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |